











Produits d'investigations subaquatiques
Équipements subaquatiques
- Positionnement de surface
- Positionnement sous marin
- Assistance au pilotage
- Échosondeurs et scanner 3D sous-marins
- Géophysique et sismique
- Imagerie sous-marine
- Magnétométrie
- Supports : ROV, USV, AUV, vedettes
- Solutions spécifiques Travaux maritimes et fluviaux
- Instruments océanographiques
- Instruments rivières
- Bouées et flottaison


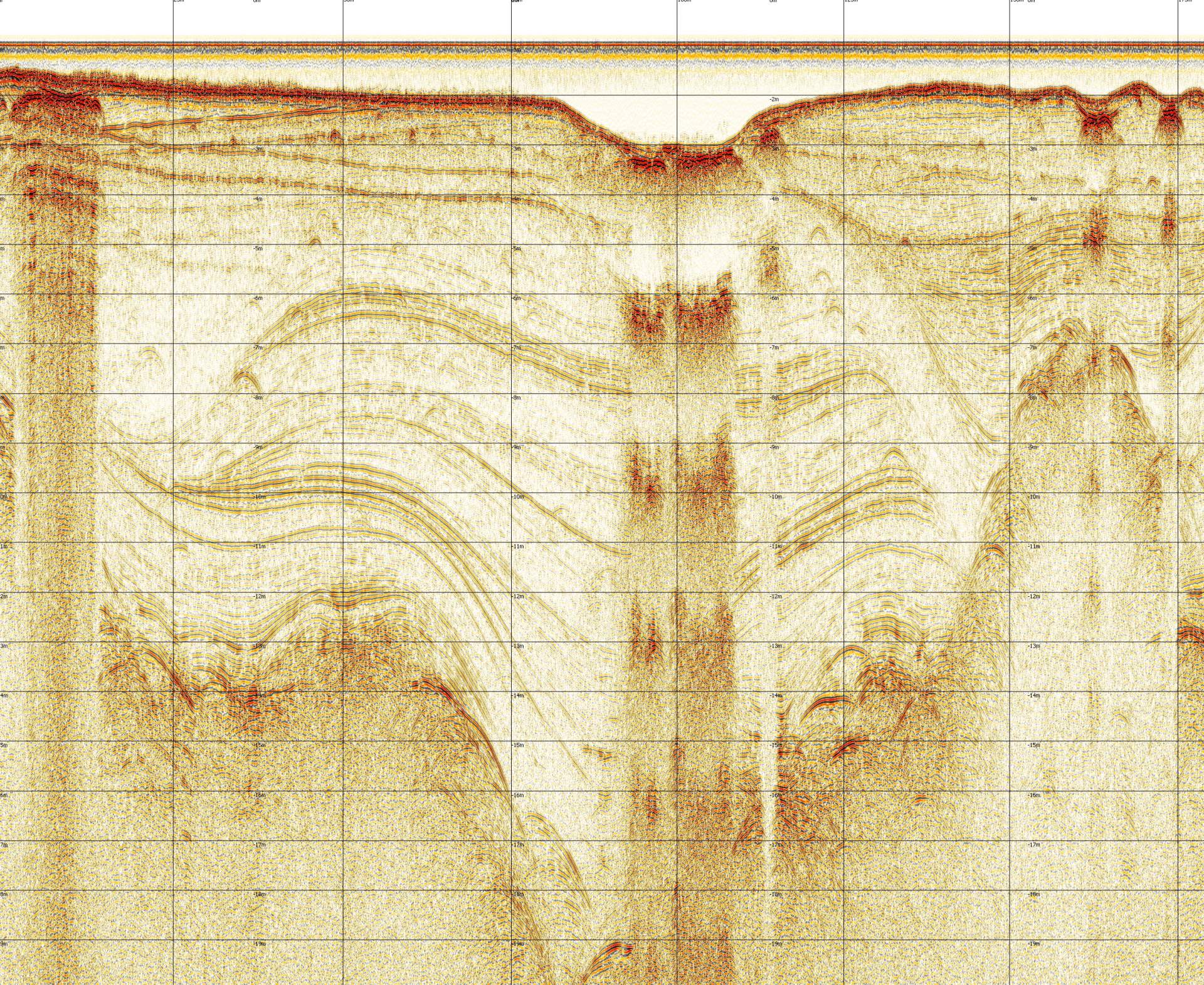



Profileur de Sous-fond INNOMAR MEDIUM 70

Conçu pour les applications offshore jusqu'à 2500 m de profondeur d'eau
Le profileur de sous-fond paramétrique Innomar « Medium 70 » est conçu pour les applications offshore jusqu’à 2 500 m de profondeur d’eau.
Ce modèle est disponible en deux versions. La version de base comprend une compensation de pilonnement et de roulis tandis que la version « RP » offre une compensation de tangage supplémentaire.
Le SBP Innomar « medium-70 » acquiert des données de forme d’onde complète qui peuvent être traitées avec n’importe quel logiciel sismique (format SEG-Y). Innomar fournit également le logiciel de post-traitement ISE spécialisé sur les données Innomar SBP.
La première génération de ce modèle SBP a été introduite en 2012 (« SES-2000 medium-70 »), tandis que la dernière génération a été lancée en 2021.
Fonctionnalités incluses
- Stabilisation du faisceau de pilonnement / roulis
- Acquisition de données de forme d’onde complète SLF 24 bits/format de données Innomar « SES3 »
- Mode multi-ping pour maintenir une fréquence élevée en eaux profondes
- Signaux multifréquences
- Chirp LFM (3 – 12 kHz)
- Extendeur KVM pour le contrôle à distance
- Télécommande de base SESWIN via COM / UDP (par exemple, démarrage/arrêt de ligne, nom de ligne)
- Cadre de transducteur avec amortisseurs intégrés pour montage sur coque
Caractéristiques optionnelles
- Télécommande étendue SESWIN via Ethernet (tous les paramètres de relevé)
- Stabilisation du faisceau de pas
- écran TFT interne 10 »
- Contrôle de la pente du fond
Logiciel
- Logiciel d’acquisition de données SESWIN
- Logiciel de conversion de données SES Convert (RAW vers SEG-Y, XTF, ASCII)
- SES NetView pour l’affichage en ligne des données et des informations système sur des ordinateurs distants
- Logiciel de post-traitement ISE (facultatif)
Les spécifications techniques peuvent être modifiées sans préavis.
Caractéristiques techniques
Gamme de profondeur d’eau : 5 – 2 500 m sous le transducteur
Pénétration des sédiments : jusqu’à 100 m (selon le type de sédiment et le bruit)
Résolution d’échantillon/gamme : 246 dB//µPa re 1m / c. 7,5 kW
Basse fréquence secondaire (SLF) : fréquence centrale sélectionnable par l’utilisateur : 3, 4, 5, 6, 8, 10, 12 kHz
Bande de fréquence totale SLF : 1.5 – 15 kHz
Type d’impulsion SLF : Ricker, CW, LFM Chirp
Largeur d’impulsion : sélectionnable par l’utilisateur 0,1 – 1,0 ms (CW); 5 ms (chip)
Acquisition et enregistrement de données : numérique 24 bit / 96 kHz (forme d’onde complète SLF, enveloppe PHF)
Format de fichier de données : Innomar « SES3 » (24 bits), « SEGY » (via SESconvert)
Interfaces de capteurs externes : HRP (mouvement), position GNSS, profondeur (tous RS232 / UDP), déclencheur (BNC)
Détection du fond : profondeur interne (données PHF et SLF) ou externe
Précision de la profondeur : (2,5 cm à 70 kHz / 5 cm à 8 kHz) + 0,04 % de profondeur d’eau
Contrôle à distance / Intégration de l’enquête : KVM / fonctions de base via COM ou Ethernet (UDP), NMEA
Unité supérieure (émetteur-récepteur) : L 52 cm × P 40 cm × H 44/63 cm (19 » / 9/13U) / poids env. 52/63 kg
Transducteur : L 60 cm × P 60 cm × H 25 cm / poids env. 140 kg (hors câble de 30 m)
Évaluation de la profondeur du transducteur : Surface
Source de courant : 100–240 V CA
Consommation d’énergie : <450W
PC de contrôle/stockage de données : PC intégré (MS Windows 10/11 OS)
Première / dernière génération de produits : 2012 / 2021

